
整机传感器采集与控制(STM32F407)
通信学代写 8路高速模拟量差分输入,分别用于:①拨禾轮高度1个②割台高度③鱼鳞筛开度1个④割台仿形传感器2个⑤超声波测距传感器2个。以上传感器均为三线制,0-5V输出(+,信号,-) 采集得到的数据按照公式转换后进行显示、调用。
一、数据采集:
1.模拟量采集:
8路高速模拟量差分输入,分别用于:①拨禾轮高度1个②割台高度③鱼鳞筛开度1个④割台仿形传感器2个⑤超声波测距传感器2个。以上传感器均为三线制,0-5V输出(+,信号,-)
采集得到的数据按照公式转换后进行显示、调用。
2.模拟量输出控制: 通信学代写
2路模拟量输出,主要用于①控制转向和割台高度流量阀的开度大小(输出电压0-10V)和②控制拨禾轮转速流量阀开度大小(输出电压0-10V)。(两线制输出-信号地与信号线)。预留2路
- 数字量输出:
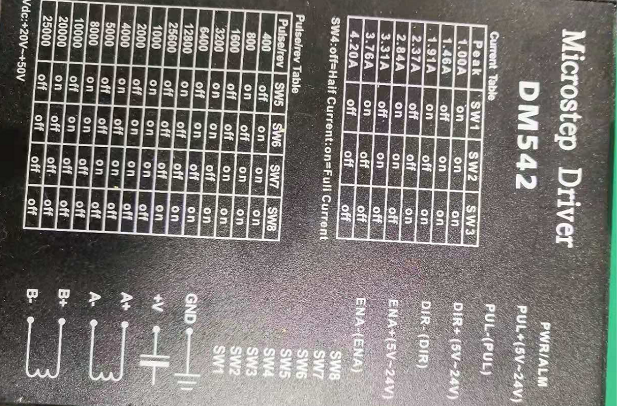
(1)步进电机控制:用于控制两个步进电机:①鱼鳞筛电动缸和②前进速度步进电机(PUL+,DIR+和ENA+共+5V接法),使用的步进电机驱动器器如图所示。
(2)电磁阀吸合控制,(电磁阀的工作电压24V)。可以通过5V电压控制继电器控制电磁阀的吸合。(5路,转向2路,升降2路,总开关1路)(推荐,可自选)
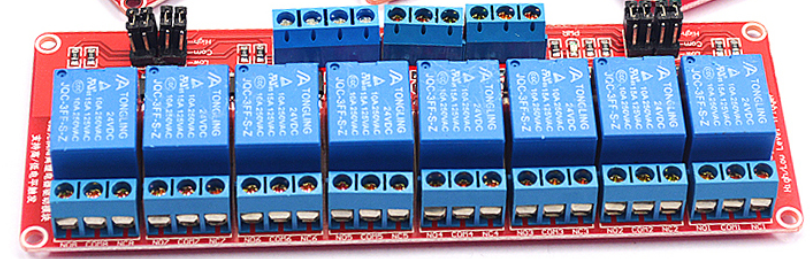
继电器(https://detail.tmall.com/item.htm?id=15909056050&spm=a1z09.2.0.0.15c22e8d4VzjqD&_u=nkfv4cf2aac)
增加点接触按钮,来控制左、右转向与割台升、降
4.转速测量 通信学代写
10路测频:分别是①前进速度②拨禾轮转速③输送槽转速④割台搅龙转速⑤滚筒转速⑥风机转速⑦杂余搅龙转速⑧籽粒搅龙转速⑨碎草装置转速⑩发动机转速(霍尔传感器,NJK5002C型)
5.计数
计数共5路,这5路中有4路籽粒清选损失量(4路监测值相加显示),1路籽粒夹带损失量(5V脉冲,LM393比较电压输出,低于阈值为0V,高于阈值为5V,另外的模块提供信号)
二、显示界面 通信学代写
所用显示屏:(广州大彩10.4寸串口屏 F系列 800*600 触摸显示液晶屏):需要您开发界面
1.第一类:计数值或计频值
(1)霍尔传感器监测值:(计频值)
①前进速度②拨禾轮转速③输送槽转速④割台搅龙转速⑤滚筒转速⑥风机转速⑦杂余搅龙转速⑧籽粒搅龙转速⑨碎草装置转速⑩发动机转速。以上各量单位:r/min
(2)籽粒损失值:(计数值)
①籽粒清选损失值,单位:粒;
②籽粒夹带损失值,单位:粒。
2、第二类:位移传感器、角度传感器和超声波传感器转换后模拟量值显示:
①鱼鳞筛开度,单位:度;②拨禾轮高度,单位:mm;③割台高度位移传感器值,单位:mm;④仿形板角度1,单位:度;⑤仿形板角度2,单位:度;⑥割台高度超声波传感器值1,单位:mm;⑦割台高度超声波传感器值2,单位:mm;
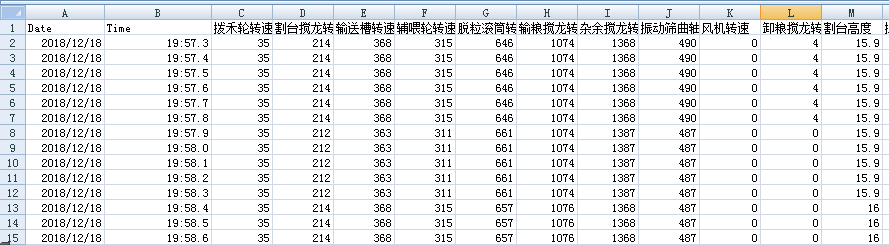
3.数据存储
显示屏设置控制按钮或进度条,可以调节鱼鳞筛开度,割台高度、拨禾轮转速流量阀开度。
三、通信控制
232通讯控制
需要编制通讯协议,接收其他上位机的指令来控制前进速度步进电机及各继电器的动作,以及控制转向和割台高度流量阀的开度大小(输出电压0-10V)和控制拨禾轮转速流量阀开度大小(输出电压0-10V)。
四、控制算法 通信学代写
主程序内调用各参数,完成计算后控制鱼鳞筛开度、前进速度、割台高度、拨禾轮转速流量阀开度等。
五、基于云平台的数据显示存储与手机APP
显示各个参数,APP控制鱼鳞筛开度,前进速度,转向及割台高度。



