
EEE3005 ASSIGNMENT INFORMATION
控制系统代写 SUBMIT YOUR REPORT TO SURREYLEARN AS SINGLE PDF FILE TYPE YOUR ANSWERS IN A WORD DOCUMENT AND SAVE AS PDF.
SUBMIT YOUR REPORT TO SURREYLEARN AS SINGLE PDF FILE
TYPE YOUR ANSWERS IN A WORD DOCUMENT AND SAVE AS PDF. CHECK CAREFULLY THE PDF BEFORE YOU SUBMIT.
ANY FIGURES OR DIAGRAMS SHOULD BE PRODUCED ELECTRONICALLY EITHER BY WORD, MATLAB OR OTHER SUITABLE PROGRAM AND INSERTED INTO THE WORD DOCUMENT. IF YOU PREFER HAND-DRAWN FIGURES OR DIAGRAMS IT IS ALLOWED BUT THEY MUST BE CLEAR,
CAREFULLY DRAWN AND INSERTED INTO THE WORD DOCUMENT.
ALL SCRIPTS WILL BE SUBMITTED TO TURNITIN. 控制系统代写
SEE SURREYLEARN UNDER ASSIGNMENT FOLDER FOR DEADLINE.
LATE PENALTY APPLIES.
For the assignment. there are two options (below). If you choose option 2, you need to have experience or willing to learn Matlab and have tried the Control Toolbox. (For option 2, you might find the Matlab tutorials useful- at http://www.mathworks.com/, and the list of matlab commands in Franklin Appendix C).
Please note the following guidelines for the report:
Table of Contents: include section numbers
Executive summary: summarizes the report in such a way that readers can rapidly become acquainted with the whole report, including major findings and conclusion.
Introduction: identifies to the reader the background, aim and purpose of the report, with a short guide to the sections in the report.
Conclusions: summarises findings and any overall conclusions, also discusses future work that you might later perform.
Choose one of the following two options: 控制系统代写
Option 1) Write a report ‘Use of Classical Control methods in modern industry’ Typically, your report will contain at least:
• Brief history of classical control methods (PID, Frequency response, Root Locus)
• How Classical Control differs from state space methods
• Why certain types of problems in modern industry may be more suited to Classical Control methods – should be the main focus of the report, and include Examples or Case Studies (suggested 2 or 3). Try to describe why classical method or a variant is chosen over state space methods. The examples or case studies could be from industry, and should include both control technique and practical application, describing how the problem has been solved.
The report should be well structured, containing Table of Contents, Executive Summary, Introduction, Conclusion, and References. GuideLength 4500 words (excluding appendices), plus an ‘Executive’ Summary of approximately 600 words For the appropriate level of writing, imagine you are consultant for a company, presenting a report to an audience that is technical but not necessarily expert on all aspects of control. If you want to include a lot of detail, use appendices – which is not included in the word count. At the beginning of your report please include 1) the word count of the total document excluding Exec Summary,References and Appendices and 2) word count of Exec Summary.
Assignment 1) Marking Scheme Report 控制系统代写
Executive Summary [10]
Introduction/Background [10 ]
Main body/Content
historical survey [10]
classical control vs modern control [15]
problems and case studies, [25]
References [5]
Conclusions [5]
Use of clear/concise English [10]
Report Presentation/ layout [10]
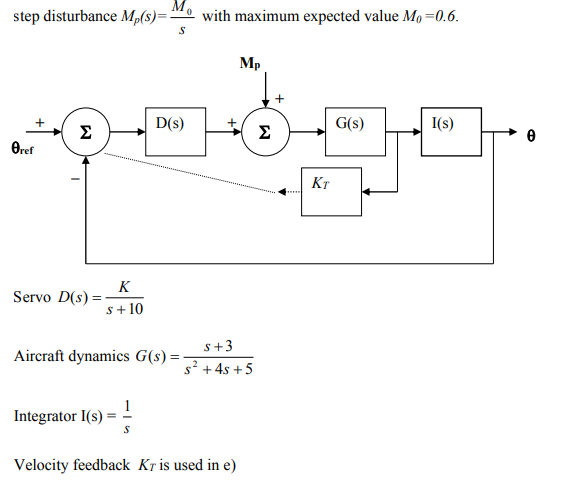
Option 2) An airline has opened a free bar in the tail of their airplanes, in an attempt to attract more customers. In order to adjust for the sudden weight shift due to passengers rushing to the bar when it first opens, the airline is adding a control system as shown in the following block diagram. The passenger movement is modelled as a
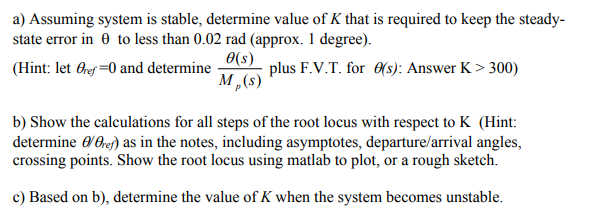
d) If K = 600 for acceptable steady-state behaviour, find the roots of the closed loop system showing that the system is unstable.
e) If K = 600, draw the block diagram of how velocity feedback with gain KT (see block diagram) may be incorporated into the control system (include transfer function in boxes). For velocity feedback, show the calculations for all steps of the root locus with respect to KT. Show the root locus using matlab to plot, or a rough sketch.
f) Determine the maximum damping factor of the complex roots obtainable with the configuration in e)
g) Find the value of KT for f)
h) Assume that the steady-state errors and damping ratio of the system with velocity feedback e), f), g) are unsatisfactory. Using Matlab simulations, discuss the advantages and disadvantages of removing velocity feedback and adding extra lead networks.
To get you started the answer to a) is K > 300. Make sure you try all parts a)-h) – in particular part h) is weighted more heavily. Note that for part (h) the lead network is of the form (s+z)/(s+p) where z<p. Part h) is a design question and deliberately openended, and there is no one right answer. To obtain a good/very good mark, you need to find a design with acceptable behaviour. You should explain how you decided on the parameter values, and discuss the trade-offs.
Assignment 2) Marking Scheme 控制系统代写
Executive Summary 10%
Report Presentation/clarity in presenting answers 15%
Introduction 5%
Conclusion 5%
Answers to part a) to g) 5% each
Answer to part h) 30%
NOTE: You can find in the powerpoint slides (see matlab_exercise.pptx), help on using matlab root locus commands. For the assignment, I am happy to clarify what is required but cannot help you to carry out the implementation. Please do ask my advice if you are not sure what is required.
Note that Tutorial 2 and solutions are for help with plotting root locus for the assignment, and will not be included in the exam.



